Noise-free (exact interpolation)
Description
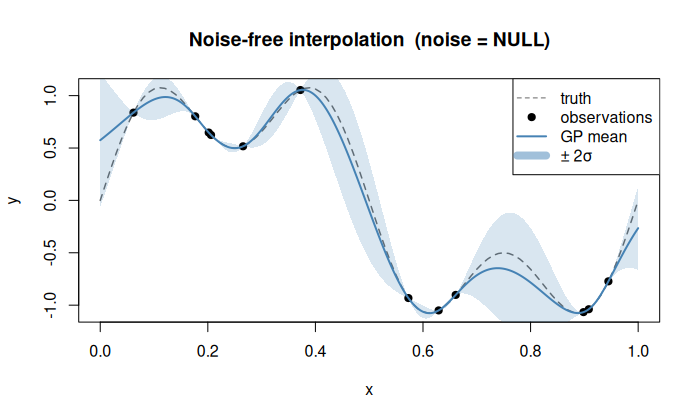
The default mode (noise = NULL). The GP interpolates the data exactly:
the posterior mean passes through every observation.
\[
\mathbf{K}(\mathbf{X}, \mathbf{X})\,\boldsymbol{\alpha} = \mathbf{y}, \qquad
\text{i.e. } \hat{f}(\mathbf{x}_i) = y_i \; \forall\, i.
\]
No noise variance is estimated or subtracted.
When to use
Computer experiments (deterministic simulators) where \(y_i = f(\mathbf{x}_i)\) exactly.
Any clean dataset where you trust every observation.
Pitfalls
Ill-conditioned covariance matrices when two design points are very close.
Over-fitting if the observations contain even small numerical noise. Consider
noise = "nugget"for regularisation in that case.
Usage
k <- Kriging(y, X, kernel = "matern5_2")
k <- Kriging(y, X, kernel = "matern5_2", noise = NULL)
Example
library(rlibkriging)
f <- function(x) sin(2 * pi * x) + 0.5 * sin(6 * pi * x)
set.seed(1)
n <- 12
X <- as.matrix(runif(n))
y <- f(X)
k <- Kriging(y, X, kernel = "matern5_2")
x <- as.matrix(seq(0, 1, length.out = 300))
p <- k$predict(x, return_stdev = TRUE)
plot(f, xlim = c(0, 1), col = "grey40", lty = 2, lwd = 1,
ylab = "y", main = "Noise-free interpolation (noise = NULL)")
points(X, y, pch = 19, col = "black")
lines(x, p$mean, col = "steelblue", lwd = 2)
polygon(c(x, rev(x)),
c(p$mean - 2 * p$stdev, rev(p$mean + 2 * p$stdev)),
border = NA, col = rgb(0.27, 0.51, 0.71, 0.2))
legend("topright",
c("truth", "observations", "GP mean", "±2σ"),
lty = c(2, NA, 1, 1),
pch = c(NA, 19, NA, NA),
col = c("grey40", "black", "steelblue", rgb(0.27, 0.51, 0.71, 0.5)),
lwd = c(1, NA, 2, 8))